Researchers are developing intelligent robotic systems that adapt to individual learning patterns, potentially transforming physical therapy outcomes for mobility-impaired patients

The path to recovery for stroke survivors taking their first tentative steps, or individuals navigating daily challenges from balance disorders, often feels overwhelming. As people walk, their brains and bodies must work in unison to coordinate a complex process involving multiple muscles and joints so they stay balanced and moving forward.
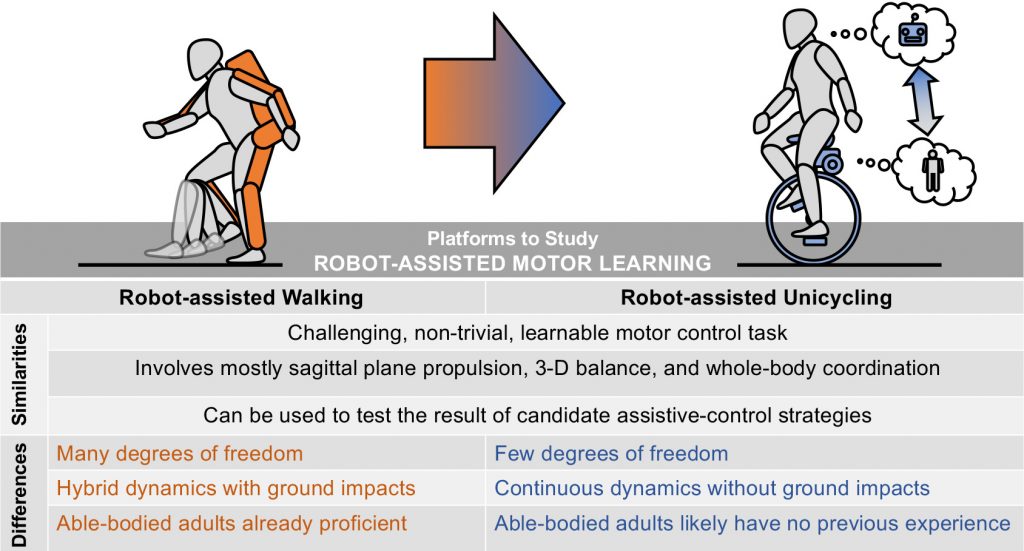
A new research project led by FAMU-FSU College of Engineering Assistant Professor Taylor Higgins will investigate the process of acquiring motor skills by studying how people learn to control a machine where balance and movement is constant and crucial — the unicycle.
The research has three major goals: to study how humans learn to balance and propel themselves on the unicycle; to compare human learning with machine learning; and to consolidate these findings into robotically assistive devices that accelerate the speed at which humans learn new movements.
The researchers want to use the unicycle robot and accompanying algorithms to study how robotics-based platforms can help humans acquire skills, in this case, learning the mechanically complex task of balancing and propelling themselves forward. The work will inform future studies and tools for physical therapy that could be applied to patients relearning to walk.
“A lot of assistive robotics research focuses on helping people with movements they already know how to perform,” Higgins said. “Our study will focus on how people acquire new motor skills. If robots can help healthy people learn a task faster, they can then be adapted to help people undergoing rehabilitation to regain lost skills faster. Faster learning means faster rehab.”
The $799,000 project is supported by the National Science Foundation’s Mind, Machine and Motor Nexus program, or M3X.
The M3X program supporting this project funds fundamental research that enables intelligent engineered systems and humans to interact with each other. This research requires advanced technologies to collect data from the human user and to react to this data by adapting its behavior on the fly. The goal is enhancing safety, productivity and well-being for people employing robotic assistance in complex and changing situations.
HOW IT WORKS
Creating mathematical models of walking is complex. The movement involves repeatedly making and breaking contact with the ground, in what engineers call a hybrid dynamic system. In contrast, a unicycle remains in contact with the ground, which represents a continuous system that is easier to model mathematically.
“It’s really hard to get a robot to walk on two legs at all,” Higgins said. “The problem gets that much harder when you have to guide a human through the learning process at the same time. We are using a simpler mathematical model that allows us to focus more on how the robot is engaging with the human.”
The first stage of the project is to study how subjects learn to unicycle unassisted. As new riders practice, the research team will use motion-capture suits to gather data from their joint positions and mathematically model their movement through space during the learning process.
Then researchers will use reinforcement learning to train a simulated “robot coach” to guide a simulated human learning to unicycle. The coach will be rewarded for accelerating learner skill progress. Although each agent is simulated, this part of the project studies how reinforcement learning can facilitate the bidirectional relationship between a robotic coach and a human learner — the coach guides the learner, and the learner’s progress informs the coach.
Finally, Higgins’ team will build a unicycle capable of providing robotic assistance and use the learning strategies developed in step two to teach novice riders. They will study whether the robotic coaches accelerate the learning process.
The coach will be assistive: assisting learners at first, then decreasing support and adding resistance to a task as riders progress, helping them quickly acquire and cement this new skill.
WHY IT MATTERS
Walking is crucial for health and independence. The unicycle project gives researchers a better understanding of how people acquire another complex motor skill and how robotic coaches could help.
Existing tools for walking rehab, such as robotic exoskeletons, are typically pre-programmed with movements or require rudimentary input from patients to function. Higgins’ research is a step toward models that interact with patients, accelerating and improving rehabilitation.
The approach focuses on gradual independence. As learners make progress, they require less robotic assistance over time.
“We don’t have algorithms that tell us exactly what the robot should do to help you to learn. That’s the missing piece,” she said. “By simulating paired robotic agents — a ‘student’ learning while a ‘coach’ guides — we can gain insights into the mechanics of human learning and adapt our technologies to better serve rehabilitation needs.”
INTERDISCIPLINARY COLLABORATION
Higgins is collaborating with Brady DeCouto, an assistant professor in FSU’s Anne Spencer Daves College of Education, Health, and Human Sciences, who studies the human learning process independently of robotic involvement. They will work with Shreyas Kousik, an assistant professor at Georgia Tech and an authority in machine learning for robotics and reinforcement learning in artificial intelligence systems.